Close to the world of science fiction, Japanese researchers continue their quest to combine the world of life with that of machines. A team from the University of Tokyo specializing in biohybrid performance has designed a bipedal mini robot measuring a few millimeters, whose artificial skeleton and biological muscles allow it to move forward and turn over a very small radius in the water. These results have been published in the journal Affairs from January 26.
This research is in line with previous work from the Department of Mechanical and Biofunctional Systems of the Tokyo Institute of Industrial Sciences, such as the achievement “ robots with living skin, olfactory receptors or tissue-made muscles »mentions researcher Shoji Takeuchi, spokesperson for the team. “We focused this time on a bipedal robot powered by muscle tissue, hoping to achieve efficient, silent movements, delicate turning movements and a more human-like gait.”, continues this specialist who recognizes it “to be surprised that you could walk bipedally forward and backward.”
Between the original concept and publication, the research took almost four years, the time needed, the scientist explains, to design and manufacture the robot, cultivate and integrate the muscle tissues and then refine its walking ability.
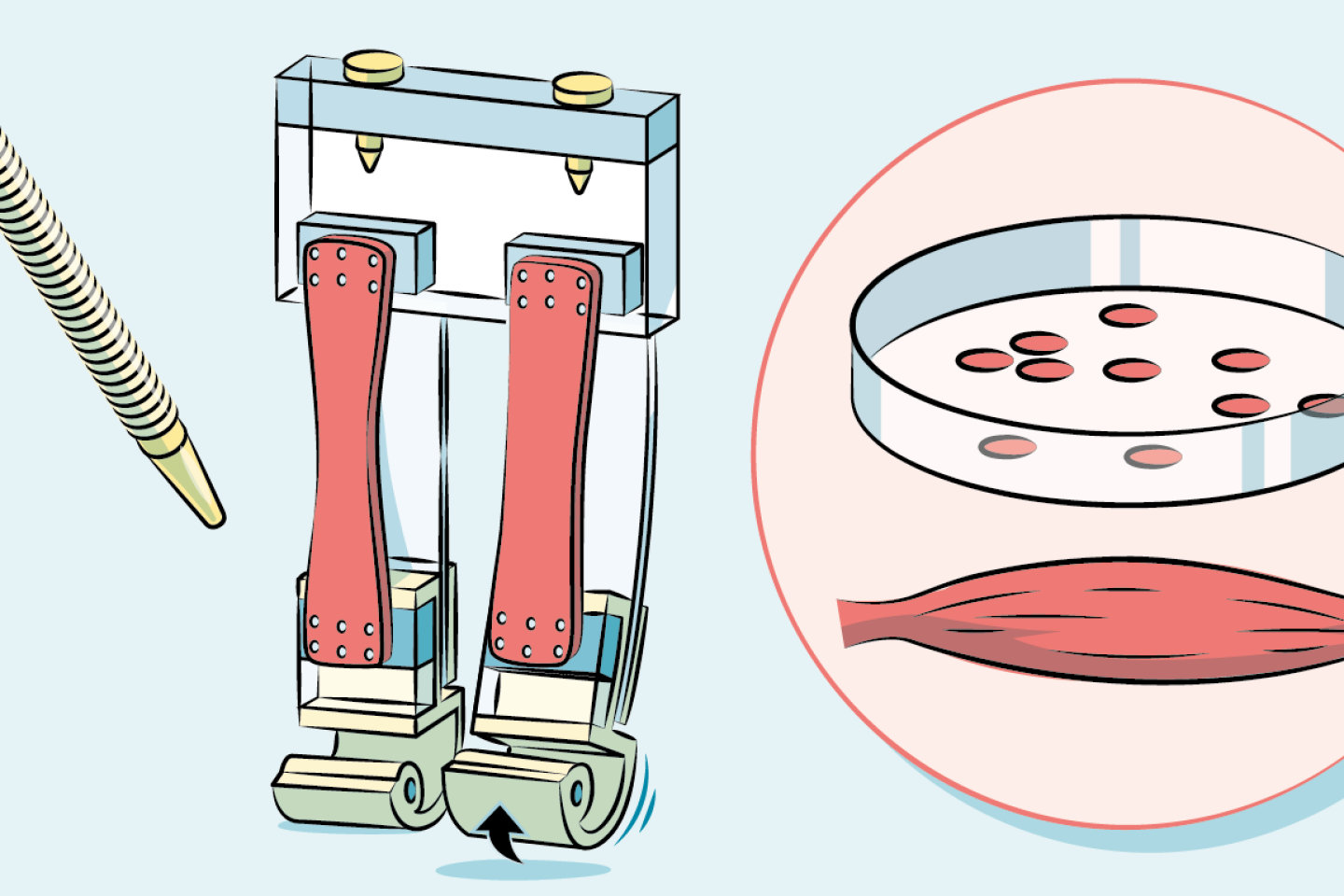
To move, the legs, made of a flexible substrate – mainly silicone – and biological muscles – obtained through rat cell culture – are electrically stimulated. These are lateral electrodes held manually that allow muscle contraction of one leg, then the other, and so on. “ One of the main difficulties was to achieve a balance between the contraction force of the muscle and the reaction force of the substrate (skeleton) and the buoyancy required for bipedal movements », the researcher specifies. To stay in the water, necessary for hydration and therefore for muscle efficiency, the legs have a float and are weighted by weights, integrated into their ends, made with a 3D printer.
“Supplementation of deficient human muscle functions”
Even if this is proof of concept is still very slow (the robot traveled 5.4 millimeters in one minute) and quite rudimentary, the Japanese team has ambitious goals: in the medium term, create biological muscles that dehydrate less in the air and “developing robots with joints that enable more advanced movements”.